
無人式ラインカー作成のための超音波による距離測定手法
澤谷凌輔
須栗研究室
2021 年度卒業
近年、AIによる単純作業の工数削減図られている中、スポーツにおける試合前の環境整備ではいまだ有人での作業が行われている。工数の削減を実現することができれば、整備時間の短縮、整備人員の削減、及び環境整備にかかるコストも同時に削減することができる。本研究では、この現状を解決するために無人式のラインカーを制作するための超音波による距離測定手法を研究した。
近年では、AIによる単純作業の工数削減が、様々な業界で図られている。その中で、スポーツにおける試合前の環境整備については工数削減が行われておらず、いまだ有人での作業が行われている。工数の削減を実現することができれば、整備時間の短縮、整備人員の削減、及び環境整備にかかるコストも同時に削減することができる。本研究では、この現状を解決するために無人式のラインカーを制作するための超音波による距離測定手法を研究する。
調査
現状では、日本のサッカーの公式戦の環境を整備している最新のラインカーは有人式となっている。まず引きたい直線の場所で、端から端をロープでたるまないように2人で引っ張り、張り巡らせる。そのロープに沿って人の手でまっすぐラインカーを引くことで、直線のラインで構成されたコートが完成する。この方式では、約2時間をかけ、複数人で整備を行うことが必要である。また、公益社団法人 日本プロサッカーリーグ(2021)によれば、中学、高校及び大学の部活動においても環境整備は行われている。しかし、運動場及び競技場のグラウンドとは違い、学校のグラウンドは芝ではなく砂で構成されたものがほとんどである。この環境下をラインカーで整備する場合、比較的粒の大きな砂利及び小石によって車体が揺れてしまい、環境整備の安定性が下がってしまう。このようなことから、環境の違いによって工数や作業効率に変化が起こることを防ぐことができれば、プロ・アマチュアを問わず、かつ整備担当者の熟練度にも依らずに環境整備を行うことができる。
ラインカーの自動化を目指した先行研究が、2017年に行われている。宮本(2017)は、全国に16139施設が存在している運動場すべてで、有人かつ複数人で環境整備作業が行われていることに人員不足の観点で懸念を感じ、ステアリングユニットを搭載したラインカーの開発研究を行った。結果、有人によるライン幅の誤差は最大2.5cmだったのに対し、自走ラインカーによるライン幅の誤差は最大0.8cmに抑えることができた。
また、新たに見つかった課題もある。この装置はあくまで直線に特化したものであるため、曲線を描くこともできる、といったような自由度は備えていない。また、この研究における実証実験だけでは、完全自動化の点が解決できなかった。
研究方法
本研究は、「ラインカーを無人でまっすぐ(ずれても軌道を修正しながら)走行させる」という動作に特化して研究し、その有効性を図るという目的のもと進めていく。その上で、仮説として、「周囲の物体との距離を測りながら走行し、車体のずれを認識した場合即座に軌道修正ができる」という挙動を実装させることができれば、無人でも安定したライン引きが可能になると考えた。また、砂のグラウンドを想定したラインカーの使用については、タイヤ部分をトラックベルト(トラクターでいうゴムクローラ部分)に変更することで、悪路の環境下でもより滑らかな走行が可能になるのではないかと考えた。
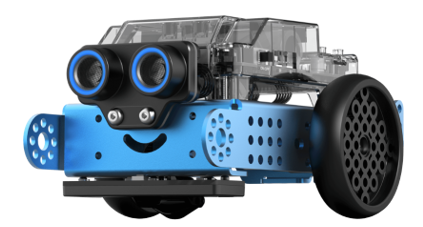
本研究では、主にmBotシリーズのロボットキットを用いて制作を進めていく。mBotシリーズは、初期状態から多数の内部センサーを搭載しており、Bluetooth、Wi-Fi及びUSBで接続したスマートフォンやパソコン上で動作するプログラミングソフトを用いた操作が可能なロボットである。操作に必要なプログラミング言語はPythonで
ある。また、このmBotには内部センサーだけでなく、外付けのセンサーパーツを装着して機能を拡張させることもでき、そのセンサーパーツの1つに超音波センサーがある。これは、超音波を送信した時間と、それが物体にぶつかって跳ね返って受信した時間との時間差によって、物体と車体との距離を測定することができるというものである。本研究は主にこの機能を用いて進めていく。
プロトタイプの制作において、今回はPythonを使ったプログラミングで、超音波センサーを用いた。このプロトタイプは、周囲に一定の距離を置いた障害物を設置し、その障害物との距離が適正である場合には一定間隔で走行する。一方、障害物との距離が適正でない、つまり車体と障害物が走行中に平行でなくなり、車体のずれ
が検知できた場合、平行になるまで角度を修正し直してから、再度走行を開始する、という仕組みとなっている。
このプロトタイプの正確性や効率を評価するため、以下の条件で実験を行った。
まず、車体と障害物の距離を検出する頻度を変えることによって、作業時間やラインのずれの誤差に変化が生じるかを実験した。検出する頻度をそれぞれ5回、10回、20回と変更し、約50cmの距離を走行させた。また、砂のグラウンドでの使用を想定し、「トラックベルト(トラクターでいうゴムクローラ部分)を装着して悪路を想定したルートを走行させる実験を行った。今回は、地面の上に小石を想定した小さな物体が散らばっている状
況を悪路として実験を行った。
まとめ
今回の実験では、作業時間は検出回数が5回の時が最も短く、精度は検出回数が10回の時が最も高いことが分かった。この結果から読み取れることとして、まず単に検出回数を増加させるだけで誤差なく正確にライン引きを行う精度が高くなるとは限らない、ということである。原因として、現段階のプロトタイプの仕組みでは、検出回数を増加させると、同時に1度に前進する距離が短くなり、修正回数が増え、修正を繰り返す毎に直線ではなく丸みを帯びた線になることが挙げられる。しかし、当然検出回数が少なすぎても車体のずれを検知しないまま進む距離が伸びてしまうため、現状では多すぎず少なすぎない検出回数を見つけ出して走行させるしかなく、今回はその回数が10回であった。また、車体のずれを検知して角度調整を行う際、微調整するためのモーターの力が坂道や悪路では足りず、正確な微調整に時間がかかってしまうことも実験結果から読み取れる。そのため、プロトタイプの形状の変化やより適した車体の駆動部品が必要になると考えた。
このようなことから、無人でライン引きを行うには十分なパフォーマンスが見られた。工数削減や作業時間という観点については今後の課題である。
参考文献
公益社団法人 日本プロサッカーリーグ(2021), 天然芝
の推進,https://www.jleague.jp/aboutj/pitch/
新技術説明会,宮本弘之,直線に特化したライン引
き,https://shingi.jst.go.jp/var/rev0/0000/6652/2017_kyute
ch_7.pdf
研究を終えて
実装してみて効果が表れた面
も見られたが、工数や人員の削減という観点からまだまだ
解決すべき課題も残った。
また、ロボットプログラミングを設計することの難しさを実感したと同時に、よりユーザーに寄り添った機能の実装が必要だと感じた。